Greenland’s Past, Our Future
KANG-GLAC studies past and present glacier-ocean changes in southeast Greenland to predict how ice loss will affect ocean circulation, ecosystems and climate.

We now live in a digital age characterised by intelligent instrumentation. Remotely controlled and autonomous vehicles can go where humans can’t, help researchers sample parts of the ocean and atmosphere that were previously inaccessible, and can increase the geographic coverage of poorly sampled areas like the Southern Ocean.
RRS Sir David Attenborough acts as a central platform for deploying and operating of a range of state-of-the-art autonomous and remotely operated vehicles in polar regions. It also has enhanced communications and data handling capabilities to enable real-time data delivery and remote UK-based instrument operation.
Autonomous underwater vehicles (AUV) are robot submarines used to explore the world’s oceans without direct control from the ship. They usually travel along a pre-programmed path to survey locations that may be dangerous or impossible for humans to reach, including underneath ice shelves and at the calving fronts of glaciers.

Some autonomous underwater vehicles carry various ‘upward looking’ instrumentation to study sea ice from below
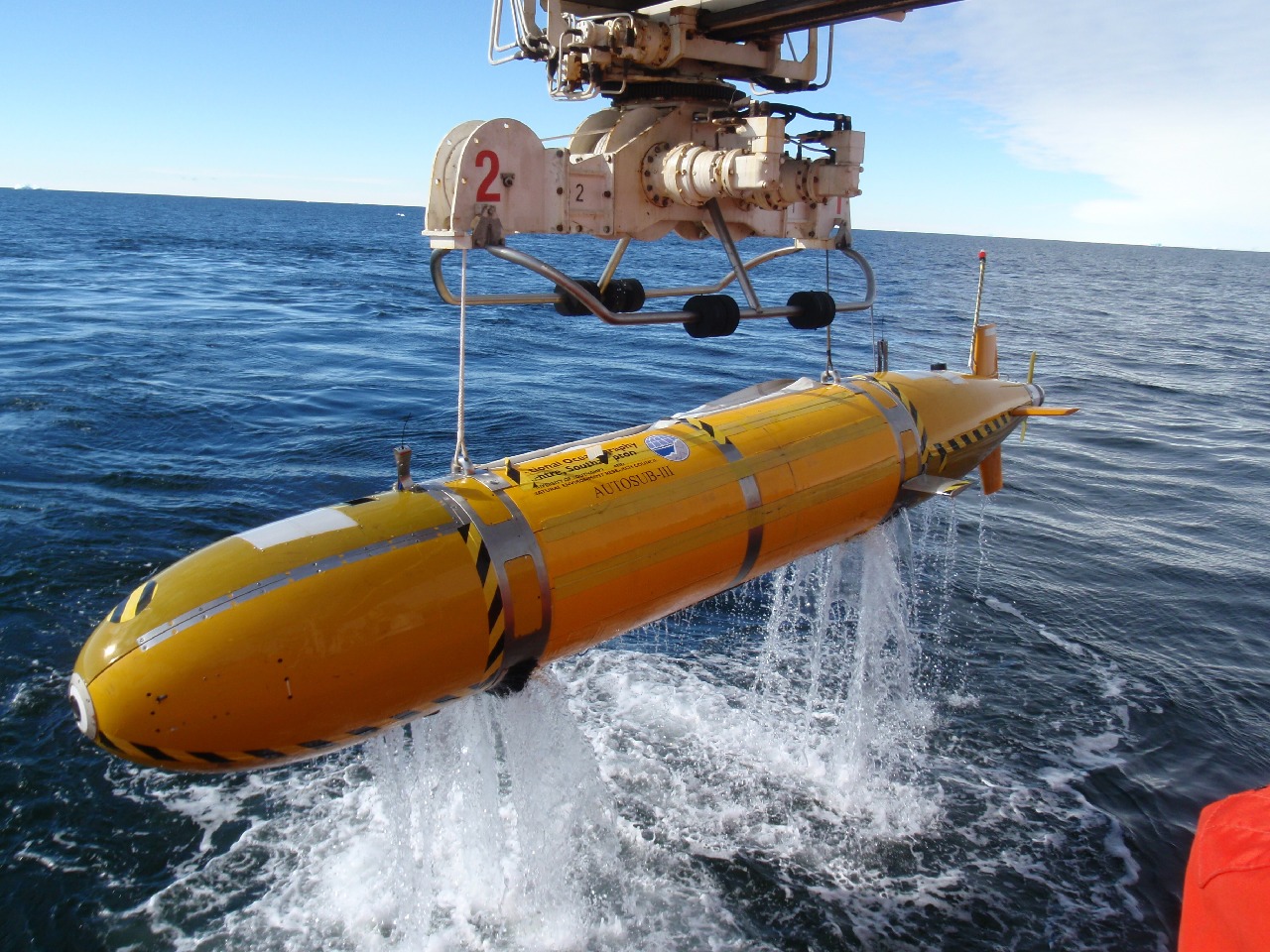
The Autosub range of AUVs was developed by the National Oceanography Centre (NOC). They are outfitted with the latest battery technology, advanced satellite communications and oceanographic sensors to map the seabed and measure the physical and chemical properties of seawater.
Before being launched from the ship, the AUV’s computers are programmed with instructions of where to go, what to measure and what depths to dive to – they can reach depths of up to 6000m. With no link to the main ship, all communications with the AUV are limited to using acoustics while the AUV is underwater. Satellite communications can only be used when the Autosub is at the ocean surface.
NOC have a number of different Autosub models, including the latest version – Autosub Long Range. This vehicle is also known as Boaty McBoatface and was first deployed in the Antarctic aboard RRS James Clark Ross in March 2017 as part of a DynOPO research cruise.

Autosub pre-deployment checks. The autonomous unmanned vehicle (AUV) Autosub-2 travels beneath sea ice carrying a variety of scientific instruments to inaccessible parts of the ocean, to make measurements of Antarctic krill distribution and abundance, and of ice thickness.
Underwater gliders are a type of robotic underwater vehicle that uses an expandable oil-filled bladder to move instead of using a conventional propeller. As the liquid is pumped into or out of the bladder, the volume of the glider changes but its mass remains the same. As a result, its density changes, allowing the device to rise or sink through the water. Its wings turn this vertical motion into forwards motion.
Gliders are extremely energy-efficient, making them a useful tool for gathering long-term data from the oceans. Depending on the sensors, instruments and extra batteries used, gliders can be deployed for up to 12 months. They can even be left in place to take measurements while the ship is elsewhere. They can be directed via two-way satellite communications link while at the ocean surface.

Ocean glider deployed in Antarctica. Photo: Damien Guihen
A Remotely Operated Vehicle (ROV) is an unmanned, highly manoeuvrable underwater robot. Unlike AUVs, they are connected to the ship by a cable and controlled by an operator on board the ship. The cable acts as an “umbilical cord”, providing the ROV with power and relaying data such as video footage and data collected by the vehicle. ROVs enable intricate surveys of the seabed, enabling the collection of precise samples from the seafloor. Experiments at extreme water depths, unreachable by human divers due to the water pressure, are also possible with an ROV.
An ROV can be manoeuvred precisely with its thrusters (propellers). Using its camera, the controller can recover small, delicate objects more precisely than any other sampling system. Scientists can also see the undisturbed area from where samples are taken, giving them a better understanding of habitats and structures. Complex in situ experiments can also happen, while maintaining the environmental conditions and minimising damage to samples caused by recovery to the surface.
The National Oceanography Centre currently operates one ROV, named Isis. It is the UK’s deepest diving ROV dedicated to science. Isis collects samples, drills sediment cores and records high-definition video and stills at ocean depths up to 6,500m. It weighs 4000kg and is fitted with cameras, lights, thrusters and numerous scientific sensors.
The RRS Sir David Attenborough can also accommodate the HyBIS ROV. HyBIS is a modular, versatile, robotic underwater vehicle that can reach depths of up to 6000m. It is equipped with a sampling grab, cameras and equipment used to record conditions in the deep sea. In contrast to a conventional ROV, HyBIS’ descent and ascent, and its operating depth, are controlled from the ship. This means it can deploy and recover loads (such as sampling equipment) up to 700km.
The Southern Ocean is an important region to study; it influences ocean currents and plays a key role in regulating the Earth’s climate. Water that is cooled here sinks to the bottom of the ocean, driving the large-scale ‘conveyor belt’ circulation. It also absorbs about three-quarters of the anthropogenic heat that is absorbed by the ocean, and approximately half of the carbon dioxide.
We don’t yet fully understand many of the processes regulating the exchange of heat and carbon between the atmosphere and ocean. Marine robotics are transforming how scientists observe the ocean by extending the reach of research vessels, supplementing and enhancing the data collected from manned platforms. This technology is therefore instrumental in furthering scientific knowledge in the data-poor Southern Ocean.
Marine robotics are opening up new areas of the Southern Ocean to scientific research missions. As they are unmanned they have the ability to visit previously unexplored environments including ocean cavities under ice shelves and hydrothermal vents.
As part of the DynOPO project, the Autosub Long Range AUV, also known as Boaty McBoatface, was deployed from RRS James Clark Ross, on three missions to measure ocean currents and turbulence near the seabed around Orkney Passage, at up to 4000 m depth. While the researchers on the ship were conducting measurements at discrete sites using the ship’s conductivity-temperature-depth (CTD) probe and free-falling vertical microstructure profilers (VMPs), Autosub traversed this area of extremely steep underwater topography, staying close above the seabed. In total the AUV covered 188 km in 75 hours, its longest mission to date. Read more here.
Data collected shows the patterns of deep currents at a resolution that cannot be measured using traditional methods. Read more about the results from the AUVs debut Antarctic mission here.
Remotely operated vehicles (ROVs) and AUVs greatly increase our ability to study the vast Southern Ocean. Using these technologies, data can be collected from larger areas, in finer detail and over longer periods of time. This is crucial for understanding how the Southern Ocean interacts with global systems.
Ocean gliders, for example, are designed to sample very densely, providing high-resolution data that is crucial for examining structures in the Southern Ocean, known as steep fronts and eddies. While they have limited capabilities compared with a large research vessel, gliders can sample specific areas in greater detail for longer periods of time.
As part of the £8.4m ORCHESTRA project, four underwater gliders and one waveglider (an autonomous surface vehicle that uses waves on the sea surface to propel itself) were deployed from RRS James Clark Ross. These gliders spent two months in the Drake Passage, off the coast of the Antarctic Peninsula, conducting surveys to study ocean characteristics and the interaction between the ocean and the atmosphere at the surface. An example of the type of data collected is found below:
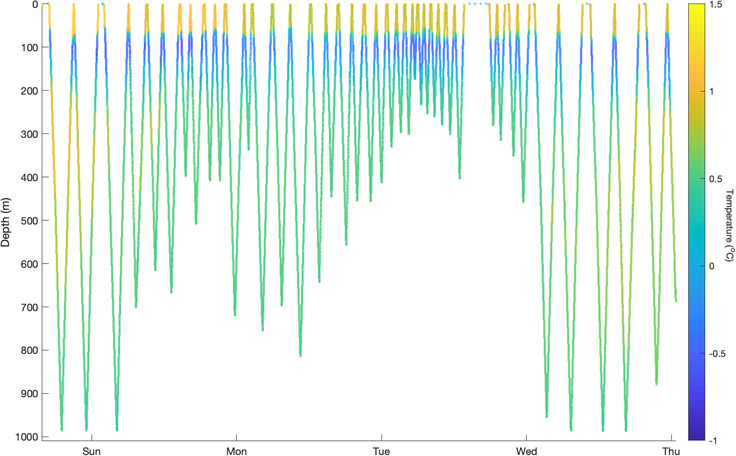
Extract of temperature data from a recent glider mission in the Southern Ocean, showing the fine detail captured by the glider as it dives through the sea. The glider was set to dive to 1000 m, stopping if its echo sounder detected the bottom before reaching this depth; it occasionally stopped at the surface to transmit data back to BAS by satellite and check for updated instructions on where to sample.
Large ROVs such as ISIS have a unique capability to explore ecosystems on the seabed. They are piloted from the surface via a tether that sends power and commands to the vehicle while transmitting data and video back in real-time. This allows biologists to study the undisturbed seabed, or even collect targeted samples. New species are still being discovered in the depths of the oceans, and these platforms allow us to see them in the context of their natural environment.
KANG-GLAC studies past and present glacier-ocean changes in southeast Greenland to predict how ice loss will affect ocean circulation, ecosystems and climate.
It was finally time to deploy the gliders and I couldn’t be more excited! Autonomous vehicles are regarded as the future of oceanography, and I feel extremely lucky to be […]

As the 2025/26 Antarctic science season comes to an end, we look back at our highlights and achievements.

Today (18 November) British Antarctic Survey (BAS) joins global celebrations to mark LGBTQIA+ STEM DAY and Polar Pride Day. Polar Pride is a celebration of the contribution of LGBTQIA+ people in polar research […]
