
Ice cap once covered sub-antarctic island of South Georgia
17 March, 2017
A new study reveals the sub-antarctic island of South Georgia – famous for its wildlife – was covered by a massive ice cap during the last ice age. The results …
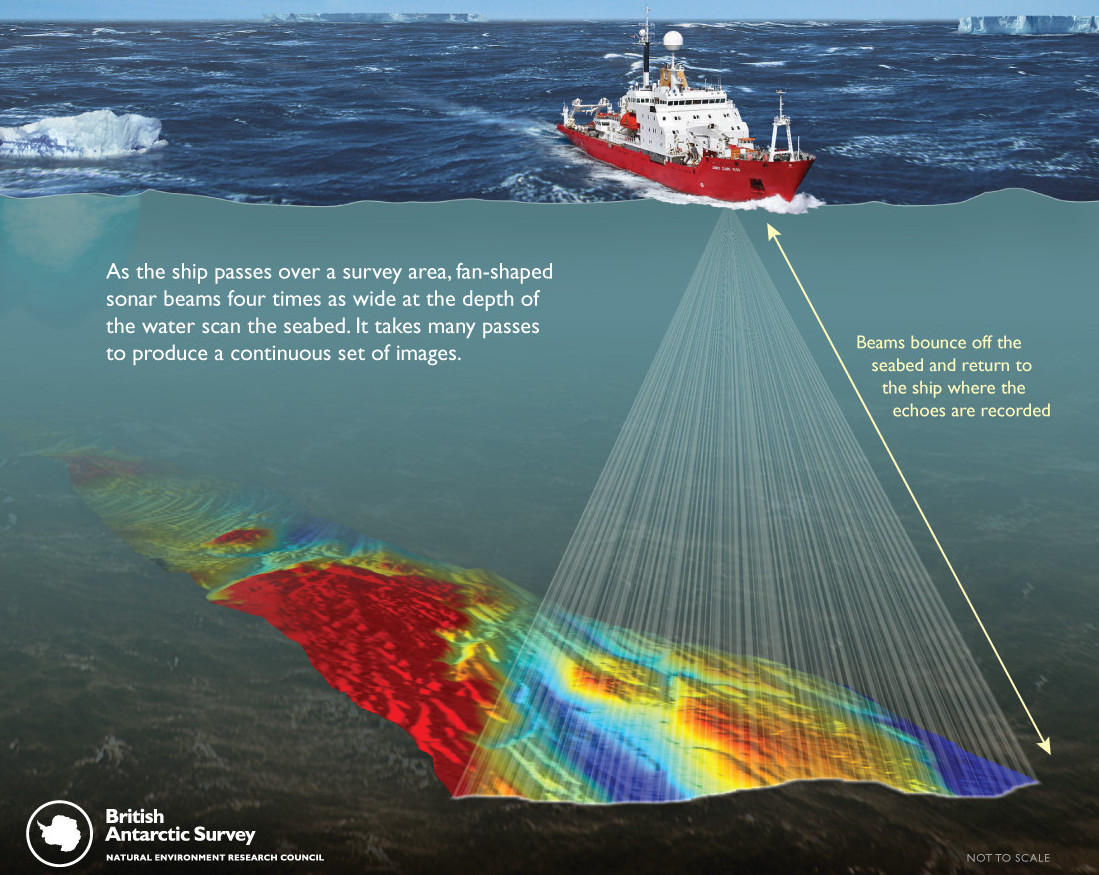
Many ships have singlebeam echosounders for navigational purposes. These systems send out one sound pulse at a time and find the depth directly under the ship. A multibeam system sends out an array of sound pulses in a fan shape and returns depths from underneath the ship and from either side as well. This is sometimes referred to as a swath bathymetry as it produces a swath of depth information. The multibeam system on the James Clark Ross has 288 beams and can map a swath width of about 4 times the water depth.
The bathymetric maps produced by the multibeam instrument are used for a wide variety of science. Marine geologists use the maps to study how the ocean crust formed, how glaciers once moved over coastal areas and as a tool to find sites for sediment coring. Oceanographers can better model how ocean currents will flow with detailed bathymetry maps. Marine biologists can use the data to map wildlife habitats and it can be used as an important tool to define fishing areas in places like South Georgia. Finally, much of the Southern Ocean is very poorly surveyed so there is an element of discovery when the ship travels to a new area.
Dep Science Leader of Palaeo Environments IMP 3
BAS-Arctic Working Group, Palaeo Environments, Ice Sheets and Climate Change team
17 March, 2017
A new study reveals the sub-antarctic island of South Georgia – famous for its wildlife – was covered by a massive ice cap during the last ice age. The results …

CONSEC is addressing the challenge to understand the links between the biodiversity, structure and function of Southern Ocean ecosystems and the impacts of rapid environmental changes to improve scientific knowledge …

On 12 July 2017, the Larsen-C Ice Shelf calved one of the largest iceberg originating from the Antarctic Peninsula ever recorded. As iceberg A68 moves north, it leaves behind an …