Autonomous Cruise Planning
Autonomous Marine Operations Planning
- Start date
- 1 January, 2023
- End date
- 31 March, 2025
Given a set of science objectives, a collection of assets and a model of the ocean and weather conditions, our autonomous task planner creates a plan of activities that achieve the science goals in the best possible way.

The automated task planner receives input written in the Planning Domain Description Language (PDDL). An example of PDDL is shown in the figure above. This is a specification of the navigation action performed by a glider. It is parameterised by the glider doing the navigating, and the two waypoints being traversed. This action can be applied by a given glider whenever the conditions are satisfied in the current state and, when applied, the effects become true in the resulting state. Using this language, we describe the capabilities of the assets, including the actions they can perform and the state transitions that result, as well as a description of the prevailing ocean conditions, the current whereabouts of the assets and the goals to be achieved.
The planner then generates a plan to achieve the goals from the given starting state. This plan details exactly where the assets are at any time, ensuring consistency of all operations and satisfaction of all modelled constraints. It can be output in a format that is familiar to the human operators, such as a spreadsheet or database, or an interactive environment.
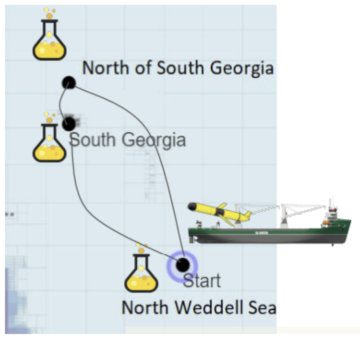
A high level plan can be constructed to achieve the goals specified in this example, where science surveys (indicated by the flasks) are required at the three specified waypoints.
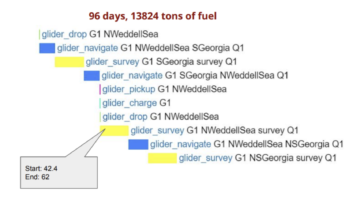
In the automatically generated plan below, the activities (dropping the glider from the ship, the glider navigating, the glider surveying an area and picking up the glider) are organised along a time line, annotated with start and end times, and the overall cost in time and fuel are reported. Start and end times are reported in days. G1 is the name of the glider being used and Q1 is the time period in which the activity is planned to take place.
The activities in this plan are abstracted to the overall cruise planning level, at which no details are modelled about the glider capabilities. The glider activities can be translated into much more detail, and glider plans can be constructed to expand the abstract tasks. In the two figures below, we see that the waypoint North of South Georgia expands into a structured survey area from the viewpoint of the glider. The survey area itself comprises a number connected waypoints which should be visited efficiently by the glider. These examples are simplified for the sake of presentation, and consequently do not appear to involve much choice. Real examples would offer a variety of different ways to undertake the necessary tasks, travel between the waypoints and optimise the travel time.

Maria Fox
Principal Researcher in Environmental AI
BAS Science Management Team, Artificial Intelligence (AI) Lab